 16.33
16.33
 fisikawan muslim
fisikawan muslim

Sekarang kita akan membuat robot monitoring suhu yang akan mengirinkan data real time sensor dengan kontrol robot menggunakan keyboard PC/laptop. Konsep robot T-SpyBOT adalah gabungan antara ADC untuk mengolah data analog sensor dan komunikasi serial dua arah menggunakan USART antara computer dan mikrokontroler dalam kendali arah gerak robot.

Untuk membuat robot monitoring suhu sistem T-SpyBOT dengan kontrol dari komputer, kita harus mengaktifkan ADC, PWM, dan USART, berikut adalah skema umum pembuatannya:

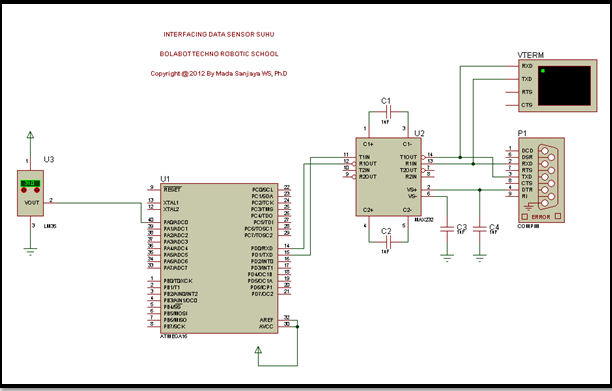
Gambar berikut merupakan desain dan program CV AVR untuk membuat interfacing data sensor suhu ke komputer yang akan digunakan dalam pembuatan robot monitoring sistem dengan kontrol PC.
Setelah melakukan kalibrasi sensor suhu dan menampilkan data suhu secara real time di komputer, selanjutnya kita akan mengaplikasinya sebagai robot monitoring suhu lingkungan T-SpyBOT, yang akan bergerak dengan kontrol dari keyboard computer/laptop. Untuk bagian pertama, penghubung mikrokontroler robot dengan computer masih menggunakan kabel. Untuk membuat robot T-SpyBOT kita perlu mengaktifkan PWM, ADC, dan USART pada CodeWizard AVR.














